Pourquoi ton robot humanoïde marche comme un frigo sur pattes (et comment y remédier)
Pourquoi ton robot humanoïde marche comme un frigo sur pattes (et comment y remédier)
Tu as passé 18 mois à concevoir ton humanoïde. L’IA de contrôle est au point, la structure mécanique tient la route, les specs sur le papier sont solides. Mais dès qu’il bouge, c’est le drame : vibrations dans les articulations, saccades au niveau des doigts, et ce bruit de servomoteur qui rappelle une imprimante 3D des années 2010. Le problème n’est pas ton code. C’est ce que tu mets dans les articulations.
Les actionneurs classiques – servomoteurs, moteurs brushless + réducteurs – ont été conçus pour des applications industrielles où le poids et l’encombrement importent peu. Les coller dans un humanoïde, c’est comme mettre un moteur de tracteur dans une main humaine. Ici, on va disséquer pourquoi ça coince, ce qui existe vraiment en 2024, et ce qui change la donne pour les équipes qui veulent sortir du paradigme « moteur + réducteur ».
Le vrai problème : tu essaies de faire du vivant avec de l’industriel
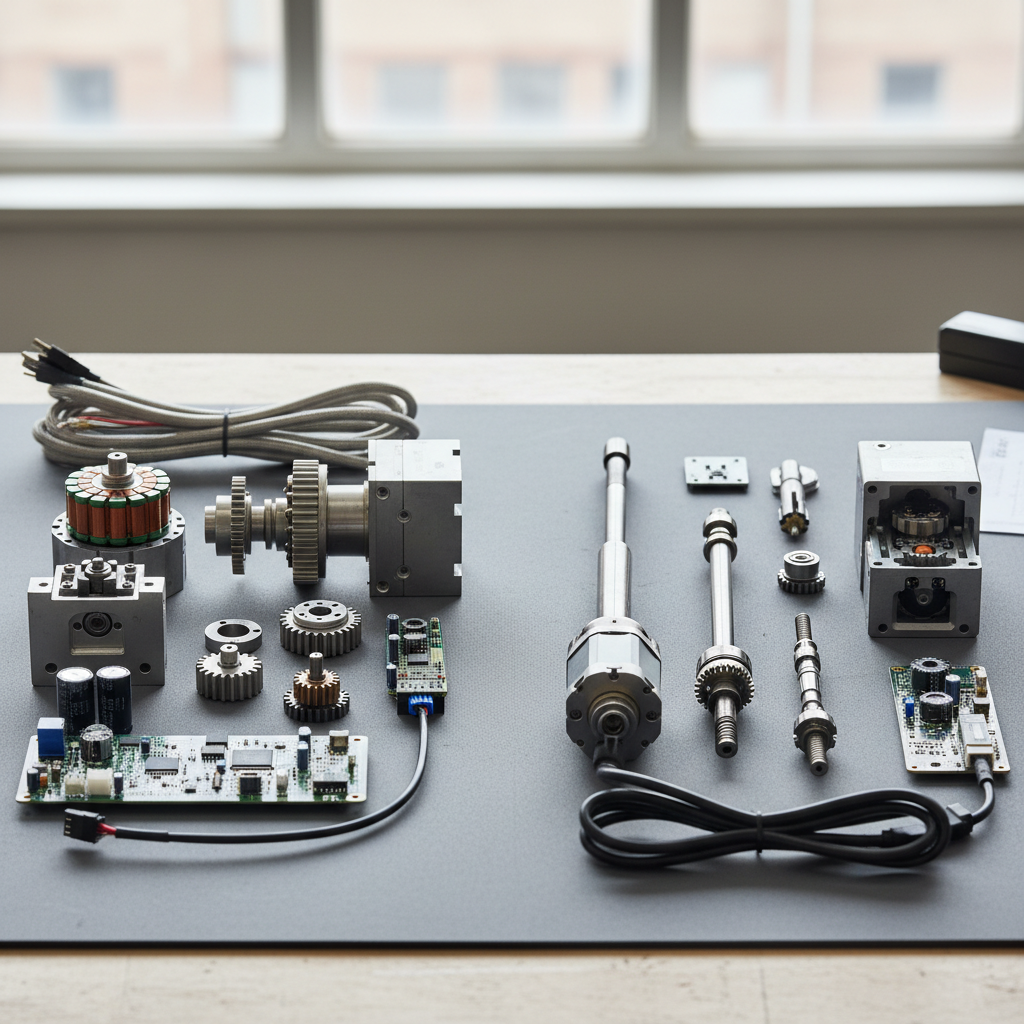
Un bras humain contient environ 30 muscles rien que pour la main et l’avant-bras. Chacun fait quelques centimètres cubes, se contracte en continu sans réducteur, et ne vibre pas. Maintenant regarde ce qu’on met dans un humanoïde : un moteur brushless de 50 à 200g par articulation, un réducteur harmonique ou planétaire qui ajoute 30 à 80g, un encodeur, un contrôleur. Total pour un seul doigt : 150 à 400g d’électronique et de mécanique.
Résultat concret : la main d’un humanoïde actuel pèse entre 800g et 2kg. Une main humaine ? 400g. Et on n’a même pas parlé de la compliance – cette capacité à absorber un choc sans casser. Un réducteur harmonique, c’est 0,5 à 2 arcmin de jeu. Sauf que dès que tu tapes dans quelque chose, ce jeu devient ton ennemi : usure accélérée, perte de précision, maintenance tous les 5000 à 10000 cycles sur les modèles courants.
Le ratio puissance/poids des meilleurs moteurs brushless compacts tourne autour de 200 à 400 W/kg. Ça semble correct jusqu’à ce que tu réalises qu’un muscle biologique atteint 100 à 300 W/kg… mais avec une densité d’intégration impossible à répliquer avec des bobines de cuivre.

Ce que tu sacrifies vraiment avec les moteurs traditionnels
Chaque choix technique a un coût caché. Voici ce que les specs constructeur ne te disent pas.
Encombrement réel vs annoncé : Un moteur brushless « compact » de 20mm de diamètre nécessite un réducteur (ajout de 15 à 30mm en longueur), un encodeur (5 à 10mm), et un driver (souvent déporté, donc câblage). L’actionneur « compact » fait en réalité 50 à 70mm de long. Dans un poignet humanoïde qui doit tenir dans un cylindre de 40mm de diamètre, c’est game over.
Bruit et vibrations : Les réducteurs planétaires génèrent 45 à 65 dB à 3000 tr/min. Les harmoniques, c’est mieux (35-50 dB), mais ça reste audible. Un humanoïde avec 40 articulations actives, c’est 40 sources de bruit. En environnement hospitalier ou domestique, c’est rédhibitoire.
Consommation en maintien : Pour maintenir une position sous charge, un moteur brushless consomme en continu. Un bras tendu à l’horizontale qui porte 500g ? Compte 3 à 8W par articulation juste pour ne pas bouger. Sur batterie, ton autonomie fond comme neige au soleil.
Backdrivabilité : Tu veux que ton robot puisse être guidé à la main pour l’apprentissage par démonstration ? Avec un réducteur 1:100, la friction interne rend ça quasi impossible sans capteurs de force coûteux et boucles de contrôle complexes.
Les alternatives qui existent (et leurs limites)
Le marché des actionneurs compacts pour humanoïdes s’est structuré autour de quelques approches. Aucune n’est parfaite.
Moteurs quasi-direct-drive (QDD) : T-Motor, MyActuator, Unitree utilisent des moteurs à haut couple avec réducteurs très faibles (1:6 à 1:10). Avantage : backdrivabilité correcte, bon contrôle en couple. Inconvénient : toujours volumineux (60-80mm de diamètre pour 5-10 Nm), et tu paies le couple par du poids (300-600g par unité).
Actionneurs série-élastiques (SEA) : Un ressort entre le moteur et la sortie absorbe les chocs et permet de mesurer le couple. Boston Dynamics en a fait son standard. Le souci : ça ajoute de la complexité, du volume, et la bande passante chute (réponse plus lente, souvent limitée à 10-20 Hz).
Muscles pneumatiques (McKibben et dérivés) : Contraction similaire au muscle, très léger. Mais il faut un compresseur, des valves, de la tuyauterie. L’intégration dans un humanoïde autonome devient un cauchemar. Shadow Robot l’a fait, mais leur main pèse 4kg avec l’alimentation.
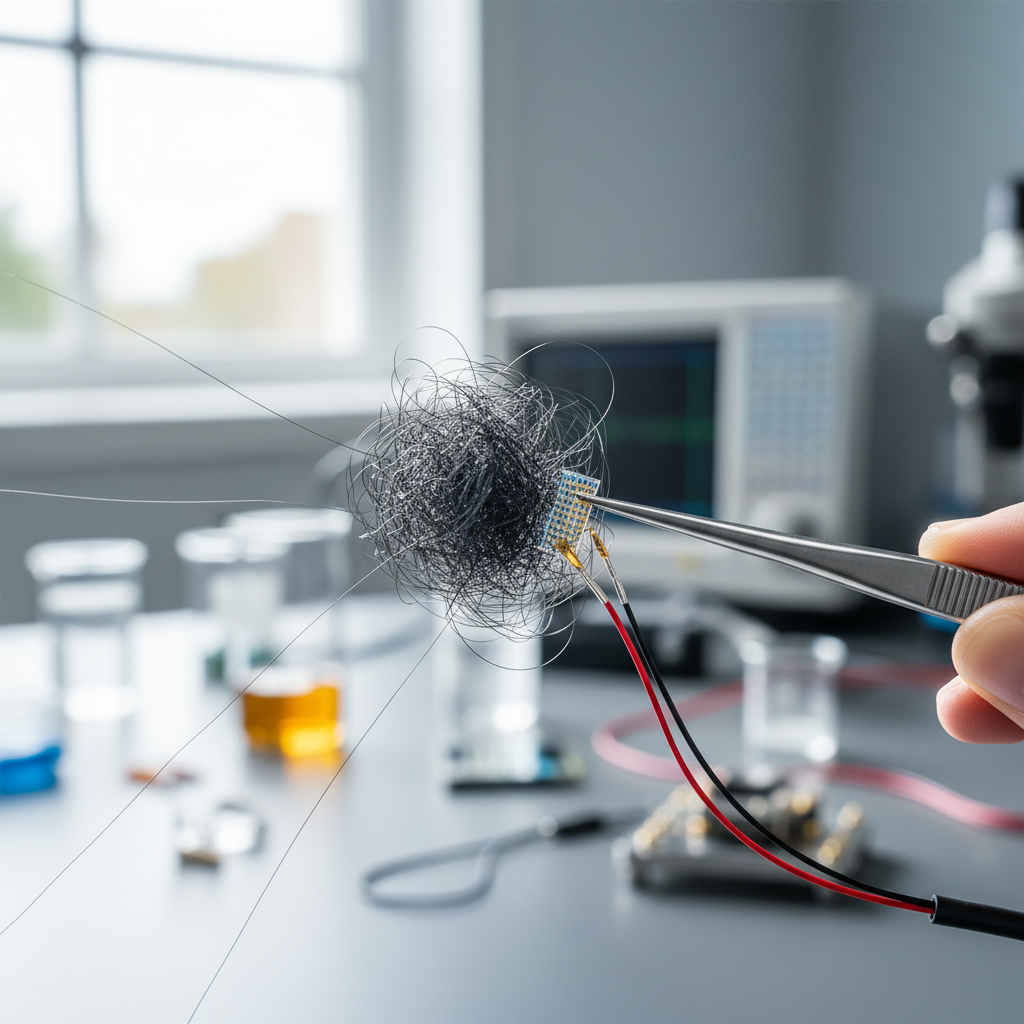
Shape Memory Alloys (SMA) : Alliages qui se contractent quand on les chauffe. Ultra-compact (fils de 0,1 à 0,5mm de diamètre). Problème : temps de cycle lent (1 à 10 secondes pour refroidir), efficacité énergétique catastrophique (1 à 2%), et durée de vie limitée à 10^5-10^6 cycles.
Aucune de ces solutions ne coche toutes les cases : compact, léger, précis, rapide, efficient, durable, silencieux.
Ce que changent les actionneurs électroactifs nouvelle génération
Les polymères électroactifs (PEA) existent depuis les années 90 dans les labos. Ce qui change maintenant, c’est qu’on arrive à les rendre utilisables industriellement.
Le principe : un matériau qui se déforme (contraction, extension, flexion) sous l’effet d’un champ électrique. Pas de pièces mobiles, pas de friction, pas de réducteur. L’actionneur occupe strictement le volume de son déplacement.
Les chiffres qui comptent pour toi :
La startup française Vulcan (basée à Station F) développe exactement cette technologie : des actionneurs PEA-CNT 100% électriques, sans pompe ni hydraulique, qui se contractent comme du tissu vivant. Leur approche « drop-in component » signifie que tu peux les intégrer sans repenser toute ton architecture – tu remplaces un moteur par un muscle artificiel.
L’argument qui tue pour l’IA embarquée : si ton robot a les mêmes actionneurs qu’un organisme vivant, tu peux utiliser directement les mouvements humains comme données d’entraînement. Plus de « sim-to-real gap », plus de modélisation de la dynamique moteur. Le mouvement capturé = le mouvement reproductible.
Comment choisir ton actionneur selon ton use case
Arrête de chercher l’actionneur universel. Choisis en fonction de ce qui compte vraiment pour ton application.
Tu fais de la recherche/prototypage : Prends des QDD type MyActuator RMD-X ou Unitree A1. C’est disponible, documenté, tu peux itérer vite. Budget : 200 à 800€ par articulation.
Tu veux de l’interaction physique humain-robot (cobotique, prothèses) : La compliance est non-négociable. Les SEA sont une option éprouvée mais volumineuse. Les actionneurs biomimétiques type Vulcan deviennent pertinents si tu peux intégrer une techno émergente – contacte-les pour un pilote.
Tu optimises pour l’autonomie énergétique : Regarde le couple de maintien. Les actionneurs qui ne consomment pas pour tenir une position (certains PEA, freins magnétiques couplés) changent tout sur batterie.
Tu vises la production série : Le coût par unité devient critique. Aujourd’hui, un actionneur QDD revient à 150-400€ en volume. Les technologies émergentes sont plus chères à l’unité mais peuvent réduire la complexité système (moins de composants = moins d’assemblage).
Tu fais une main/préhenseur : C’est le cas le plus contraint en volume. Moins de 15mm de diamètre par actionneur, 20-40 actionneurs au total. Seules les technologies ultra-compactes (PEA, SMA pour les applications lentes) passent vraiment.
Ton prochain pas concret
Si tu lis encore, c’est que tu as un projet réel et que tes actionneurs actuels te limitent. Voici ce que tu fais demain matin :
- Mesure ton enveloppe disponible – pas la spec papier, l’espace réel dans ton design avec câblage et marge thermique
2. Définis ton vrai besoin : couple crête, couple continu, vitesse angulaire, cycles par jour, budget masse et budget €
3. Teste une alternative sur une articulation non-critique avant de tout refondre
Les actionneurs classiques ne vont pas disparaître du jour au lendemain. Mais si tu conçois aujourd’hui un humanoïde qui doit marcher, manipuler et interagir comme un organisme vivant, tu dois au minimum évaluer ce que les nouvelles techno (PEA-CNT notamment) peuvent débloquer. Vulcan propose des partenariats pilotes – ça vaut un email à contact@vulcan-tech.fr si tu veux voir ce que ça donne sur ton cas spécifique avant de scaler.